Projects
Designed and assembled a custom fixture to spin a bed sensor flange for a thermal spray coating operation. Engineered around real constraints, targeting up to 250 RPM while staying within motor torque limits, selecting 11-gauge mild steel for the rotating section and 2×2 square steel tubing for the fixed stand. Built in tab-and-slot features to simplify welding and assembly, and ran RPM and robot speed calculations across different flange diameters to dial in process parameters.
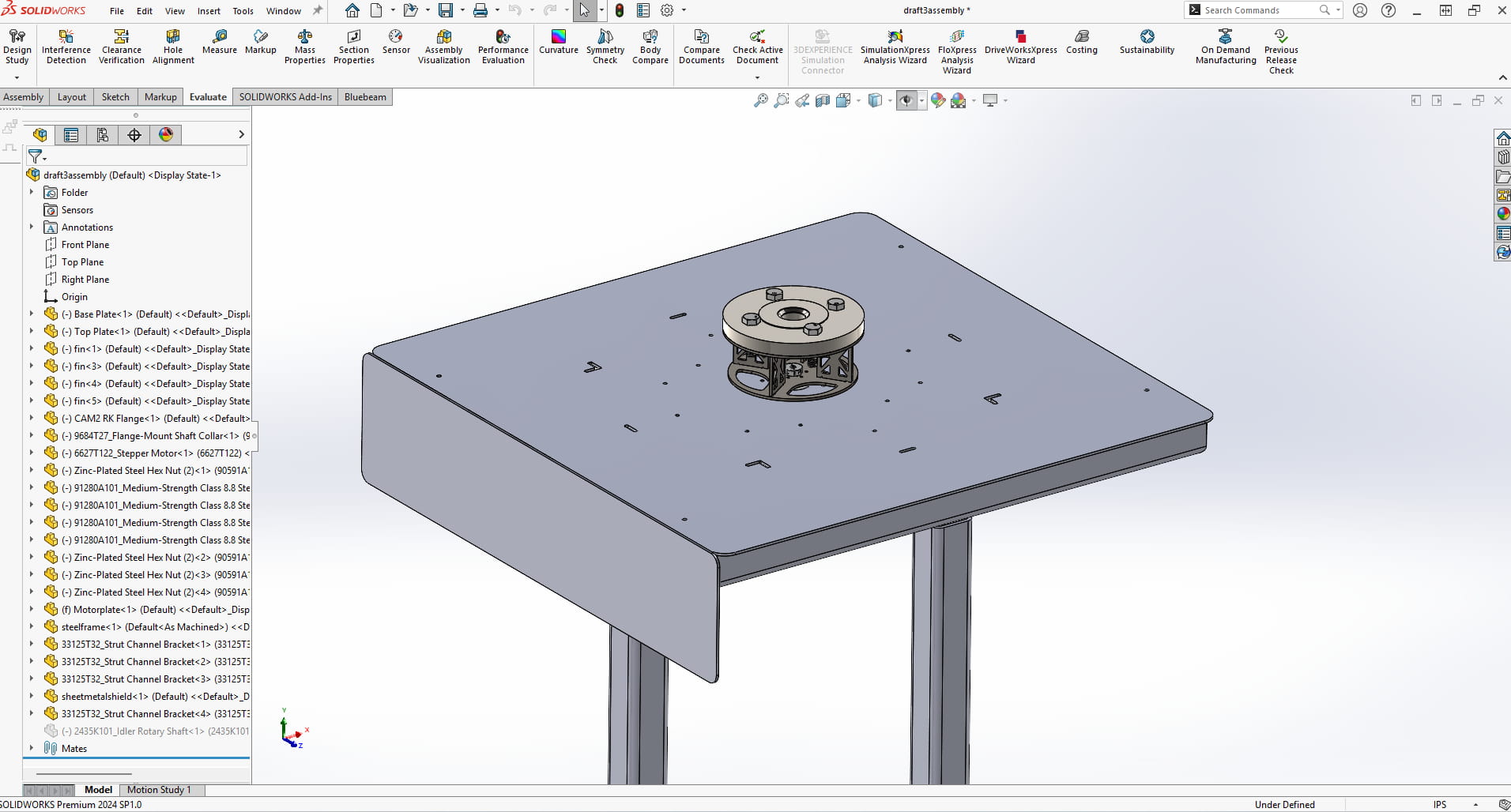
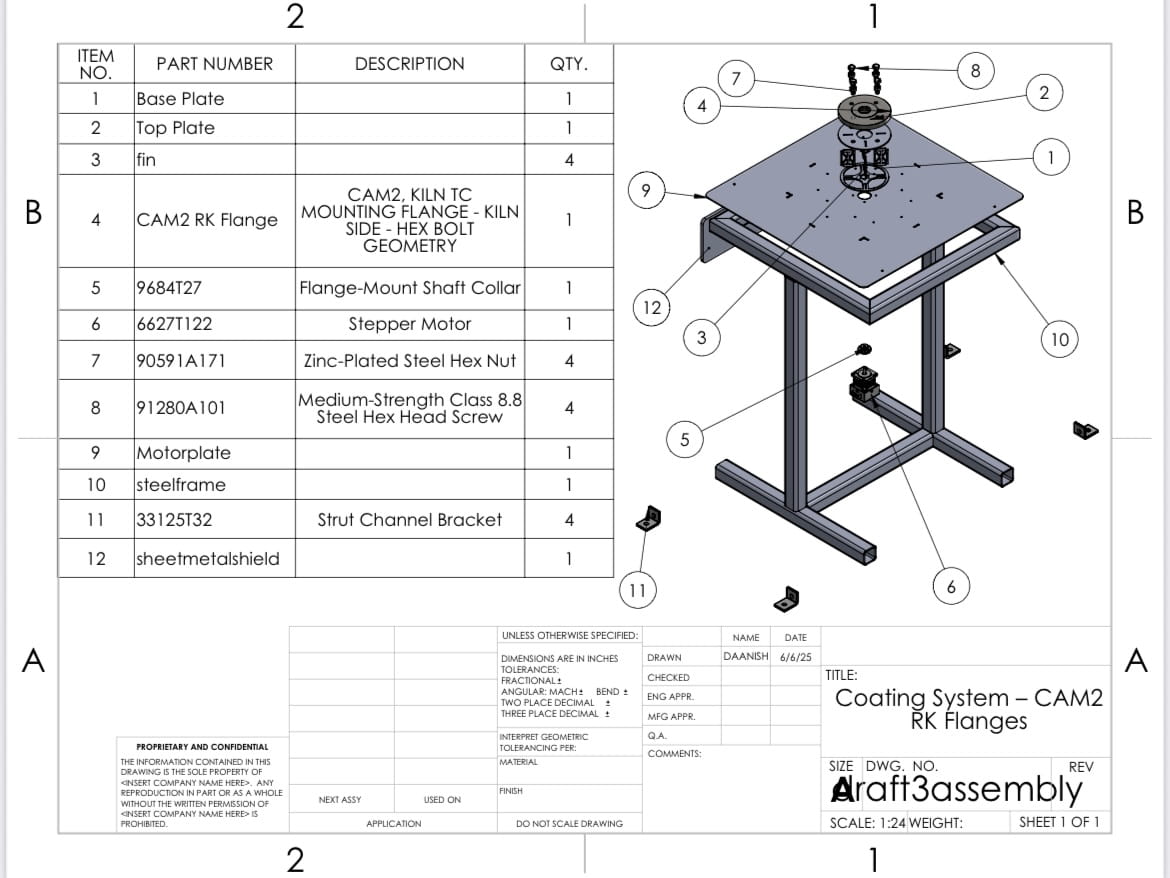
Programmed a FANUC robot via teach pendant to coat both the top surface and inner diameter of the flange, and used FANUC ROBOGUIDE to simulate and validate spray paths. Supported coating quality verification to confirm thickness met target; final coating landed in the 240–320 micron range. Part of a broader HVOF thermal spray operation that improved coating cycle time by ~12%.

Conducted metallurgy-based testing to verify coating quality, including microhardness, surface roughness, tensile, and adhesion tests, confirming coating thickness in the 200–400 micron range and proper material hardness. Streamlined the testing workflow, cutting total process time from 9 to 7 hours.

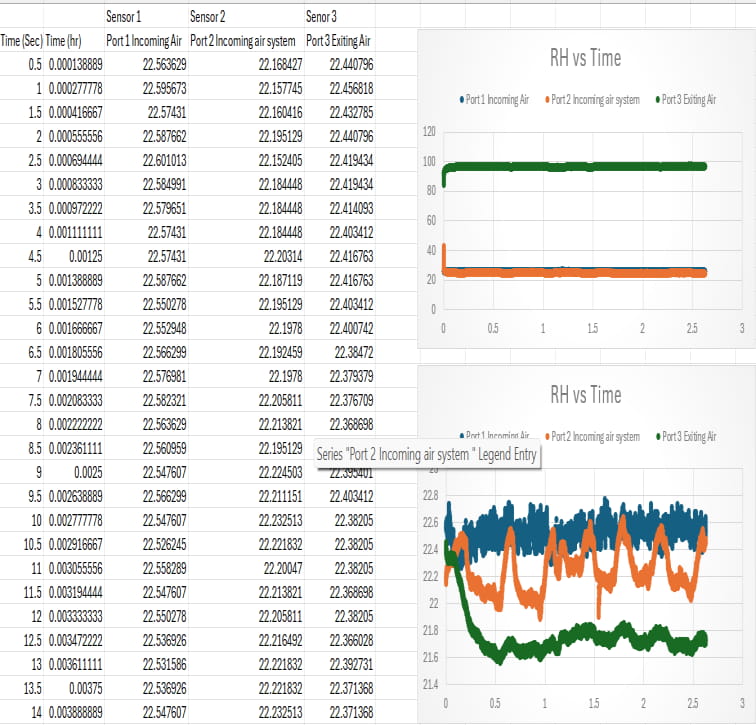
Designed and 3D printed mass exchanger components for a Single Stage LCST (Lower Critical Solution Temperature) desalination loop — a thermally-driven process that separates water from brine using a polymer solution that phase-shifts at a critical temperature. The system cycles brine through warm solution (WS) and water recovery (WR) stages, with air pumps driving humid air across mass exchanger beds while humidity (RH), temperature (T), and flow (F) sensors monitor conditions at each node.
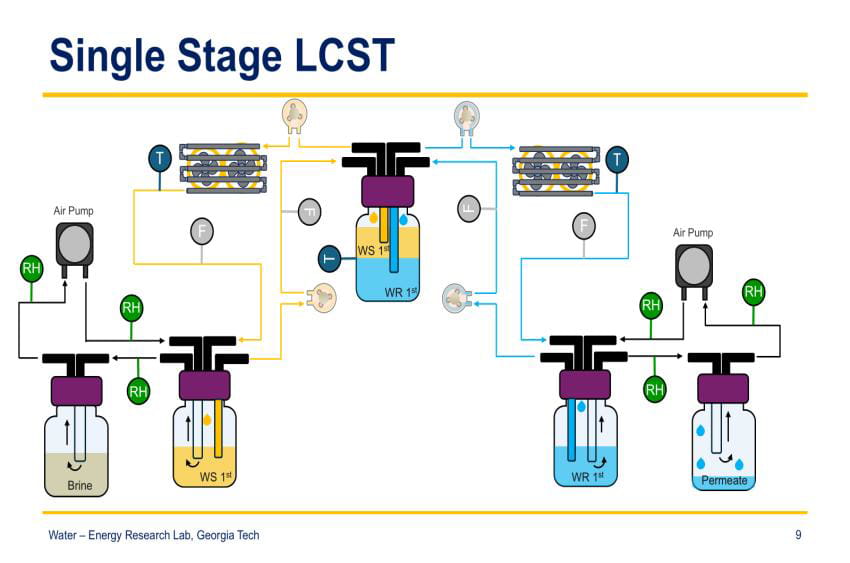
Using SolidWorks, designed detailed CAD models of the mass exchanger components and integrated mounting features for humidity and pressure sensors, control valves, a motor, and a water pump. All components were 3D printed in-house and assembled into a functional test loop. Used Sensirion sensors for real-time humidity and temperature data acquisition throughout testing.
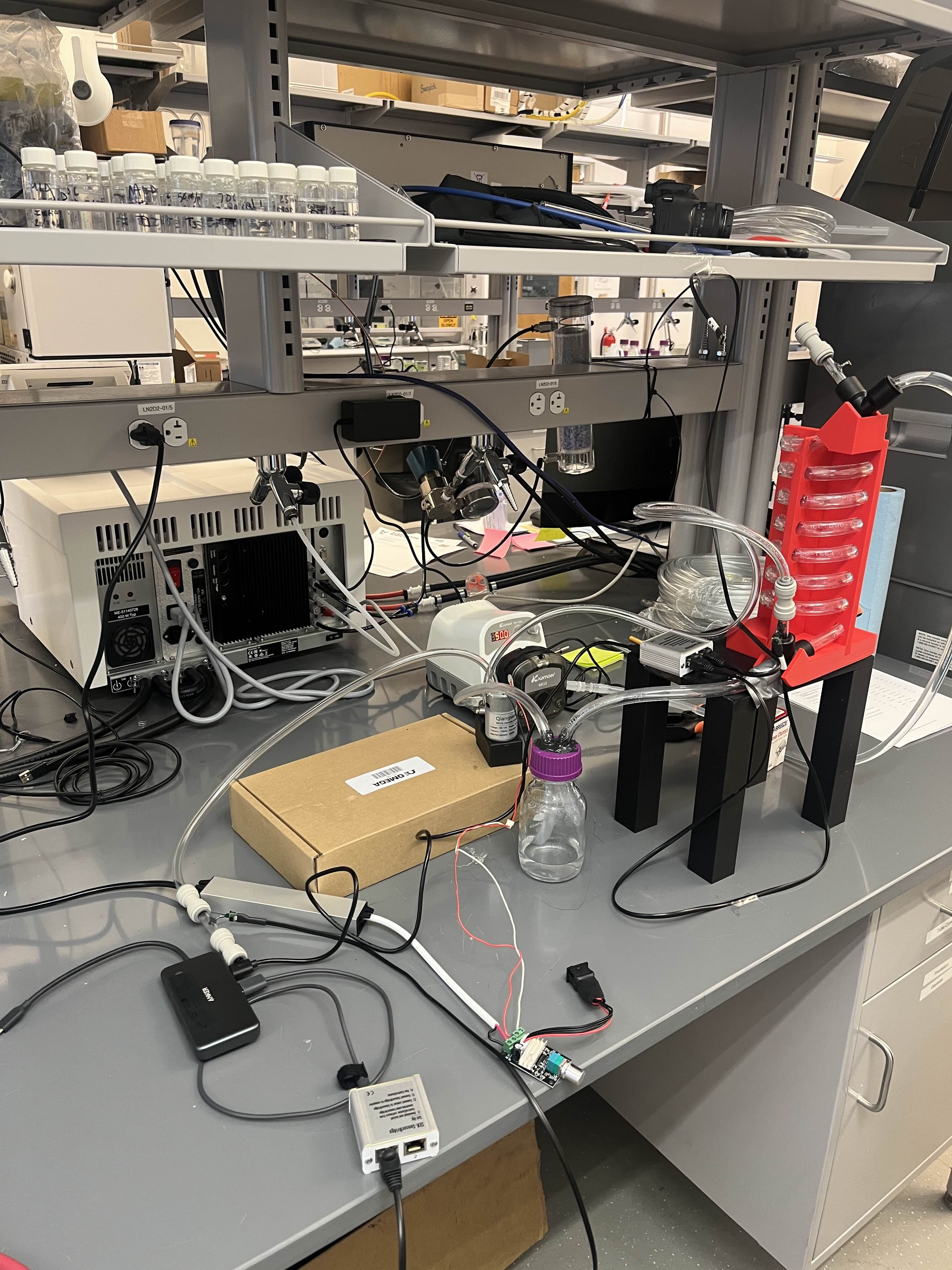
Built and tested multiple configurations of the mass exchanger to evaluate desalination performance, mass exchange efficiency, and leakage control under varying conditions. Each configuration informed design iterations, adjusting geometry, seal interfaces, and flow paths, to progressively improve system performance.
The final configuration achieved a relative humidity increase from 25.7% to 96.7%, validating the mass exchanger's ability to drive effective moisture transfer across the loop.
Designed a full 3D model of a classic Volkswagen Beetle in Siemens NX, starting from scratch using spline-based wireframe construction and building up to a complete solid body assembly. The project required generating all geometry from parametric curves — no imported bodies — forcing every surface patch, blend, and transition to be explicitly defined and modifiable.
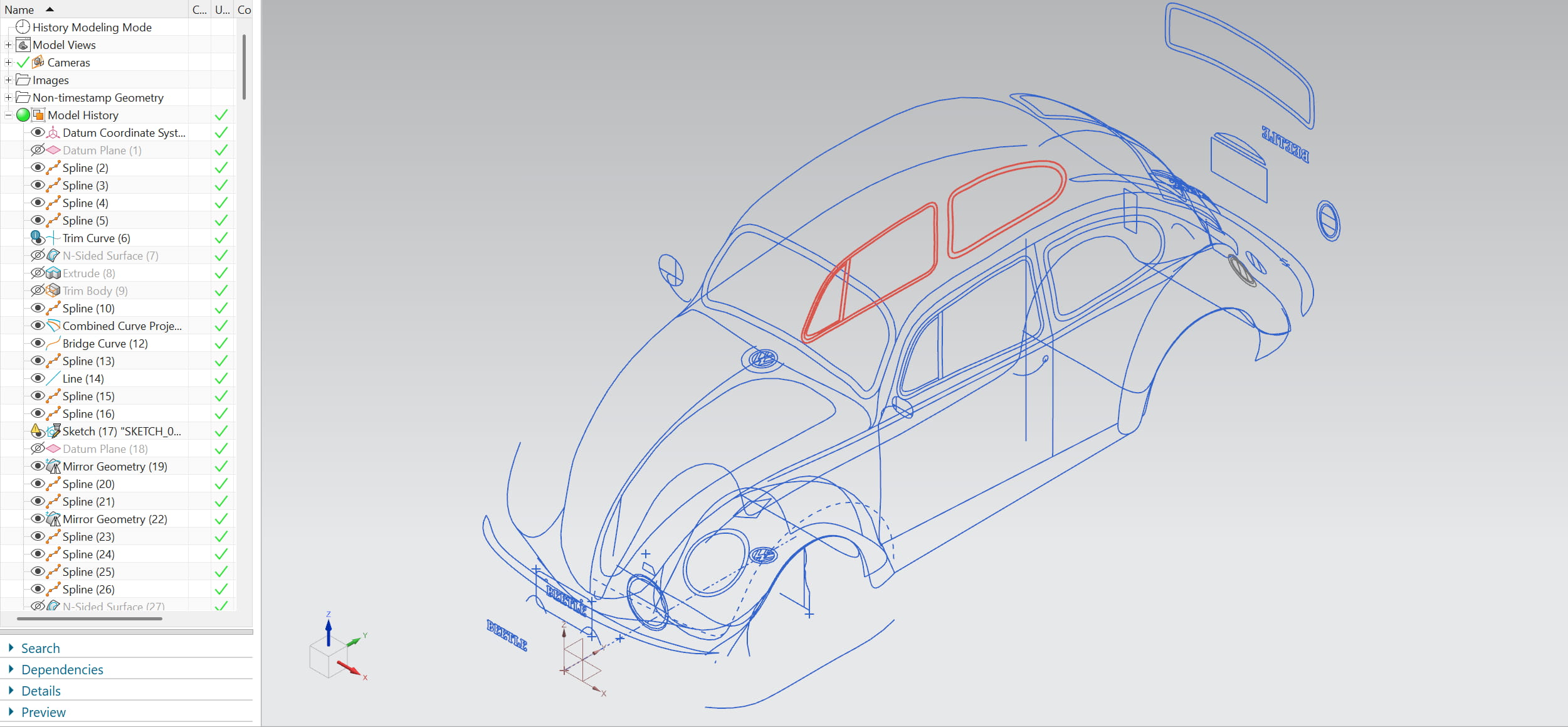

Surfaces were generated from the spline network using N-Sided Surface, Through Curve Mesh, Ruled, and Fill Surface operations. Through Curve Mesh was critical for the roof and hood panels; by defining primary and cross curves simultaneously, curvature-continuous G2 surface patches were achieved across all major body sections. Interior curves were used within UV orientation settings to control surface shape without introducing additional boundary constraints.
Achieving G2 continuity across the hood, roof, and door panels was a core requirement, enforced by carefully matching tangent direction and curvature magnitude at all shared edges between adjacent patches. Edge Blend operations were applied throughout to eliminate sharp transitions, with individual segment blending used at complex corners where chain blending caused failures. Additional features including bumpers, headlights, door trim lines, window frames, wheel hubs, and axles were modeled beyond the basic requirements.
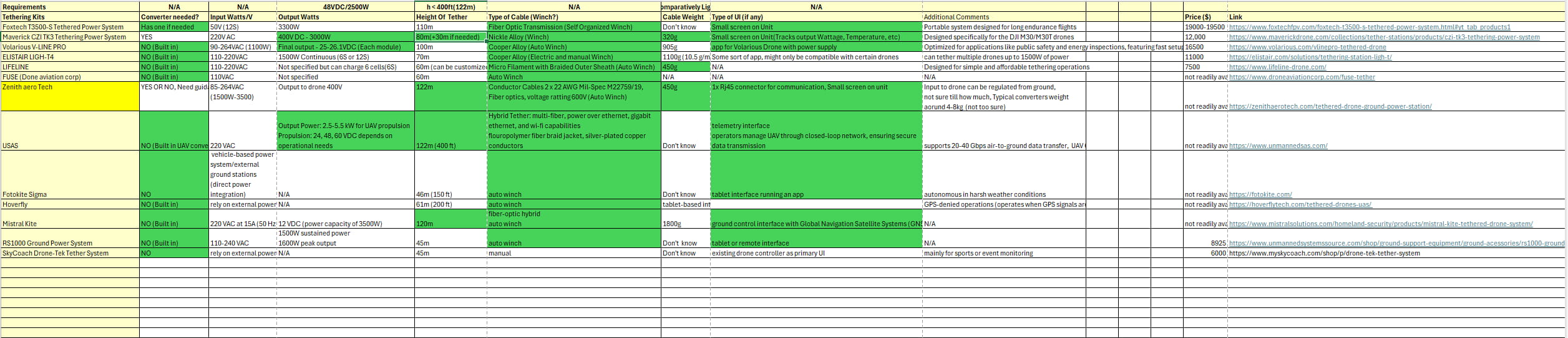
Contributing to the Tethered Relay Development subteam of the Better Place Drones VIP program, focused on enabling persistent aerial communication relay using a tethered X8 octocopter UAV. The tethered configuration eliminates battery endurance constraints by supplying continuous power via a grounded tether, allowing indefinite hover time for relay operations. Work spans from system-level component procurement research through mechanical design and fabrication of custom payload mounting assemblies.
Conducted a structured market survey of commercially available tethered power systems to identify viable off-the-shelf solutions for the X8 platform. Evaluated systems across key parameters including converter requirement, input voltage range, continuous output wattage, tether height and cable type, cable weight per unit length, UI/control interface, and unit cost. Systems assessed included the Fotokite T3500-S, Maverick C2J TK3, Volarous V-LINE PRO, ELISTAIR LIGH-T4, Zenith Aero Tech, USAS, Fotokite Sigma, Hoverfly, Mistral Kite, RS3000 Ground Power System, and SkyCoach Drone-Tek — spanning converter topologies from 48VDC/2500W to vehicle-based power systems, and tether lengths from 45m to 400ft. Key selection criteria included compatibility with 48VDC/2500W input requirements, tether height above 400ft (122m), auto-winch capability, and cable weight below 500g for flight budget compliance.
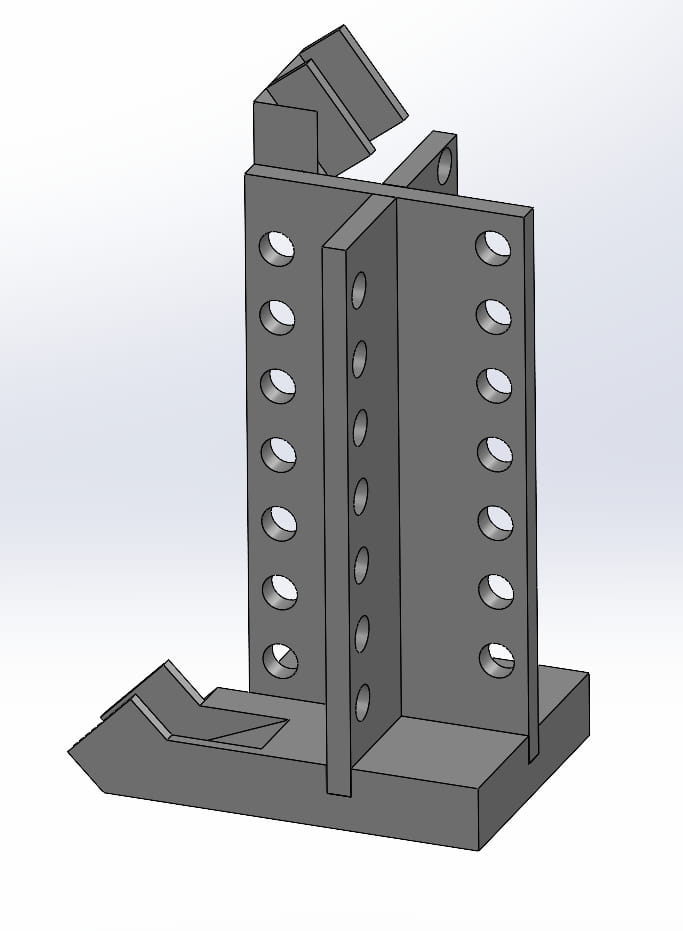
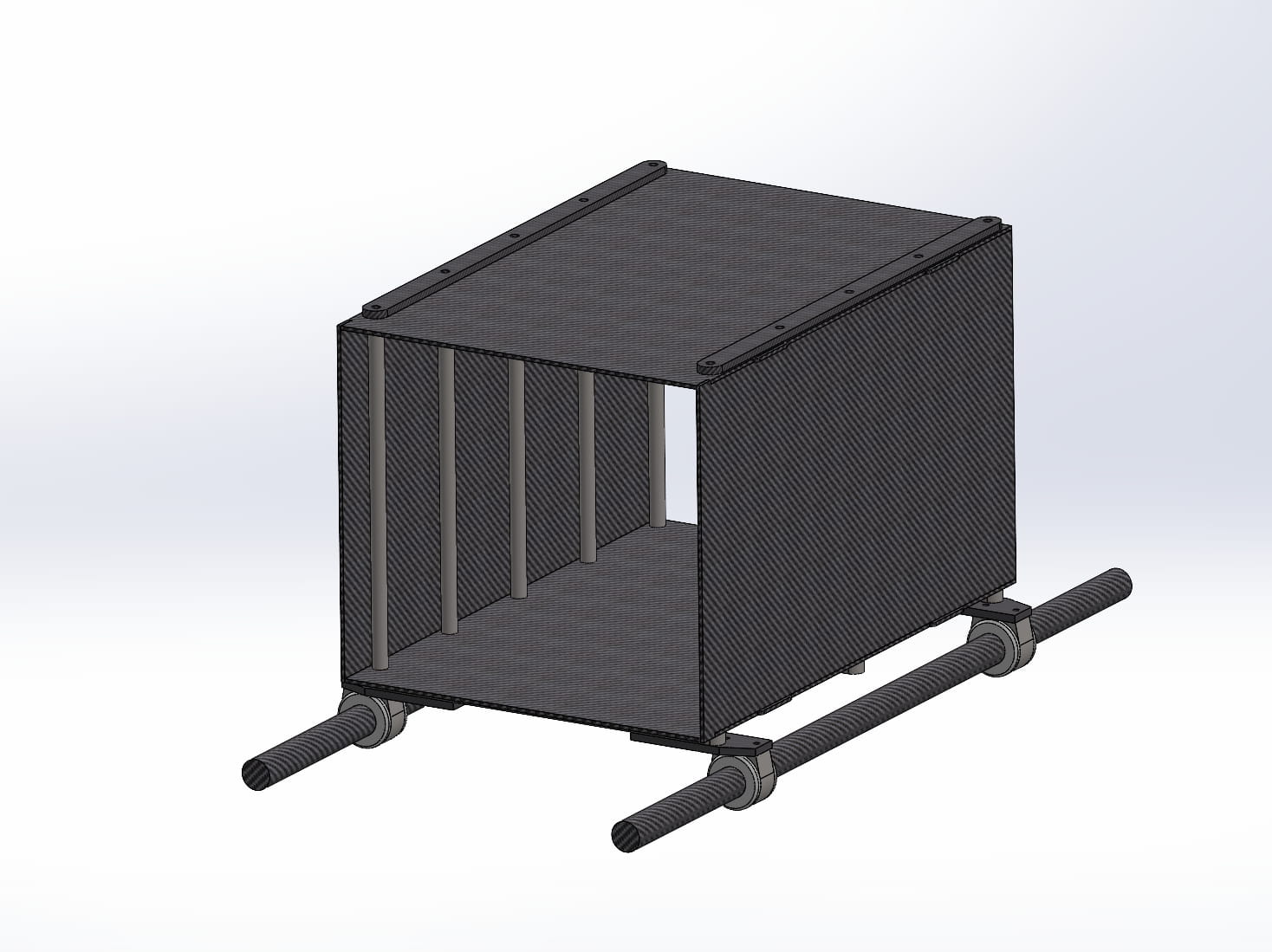
Designed and modeled two iterations of a battery and payload mount assembly for the X8 UAV in SolidWorks, sized to house onboard fuel tanks, electronics bays, and structural attachment interfaces. The first configuration is a rectilinear carbon fiber composite enclosure — an open-frame box structure with internal vertical ribs for component compartmentalization, mounted on dual lateral threaded rod rails with nut-and-clamp fastening for positional adjustability along the airframe. Panel geometry was designed for sheet material fabrication with bolted corner extrusions.
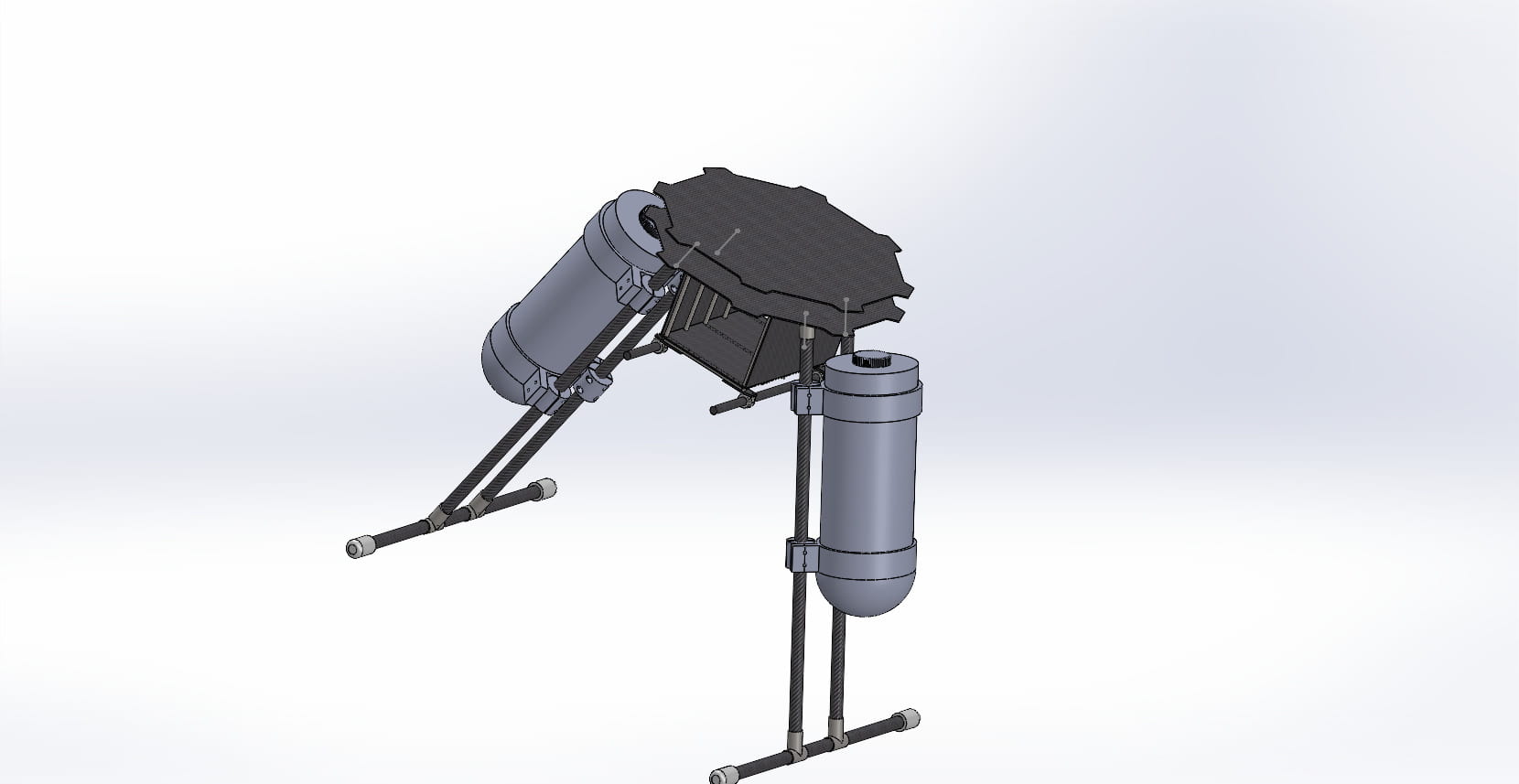
The second configuration is a cantilevered asymmetric mount integrating two cylindrical pressure/fuel tanks — one forward-mounted at an angled orientation and one vertically suspended below the frame — connected via carbon fiber tube struts with threaded rod terminal fittings. The irregular geometry was intentionally designed to offset the center of mass for balance correction relative to the UAV's existing payload distribution. Both designs account for mass budget constraints, structural rigidity under flight loads, and accessibility for field servicing.
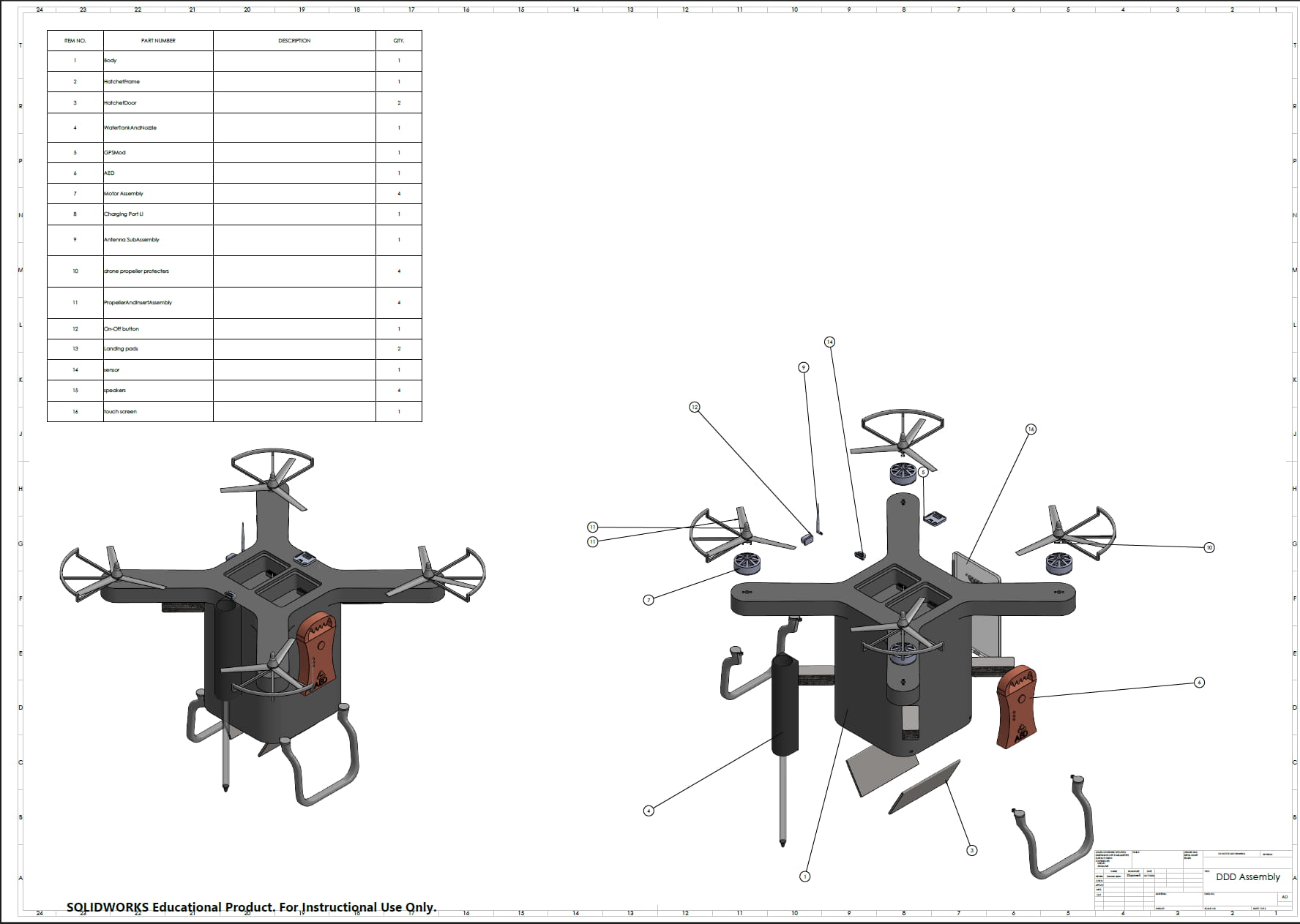
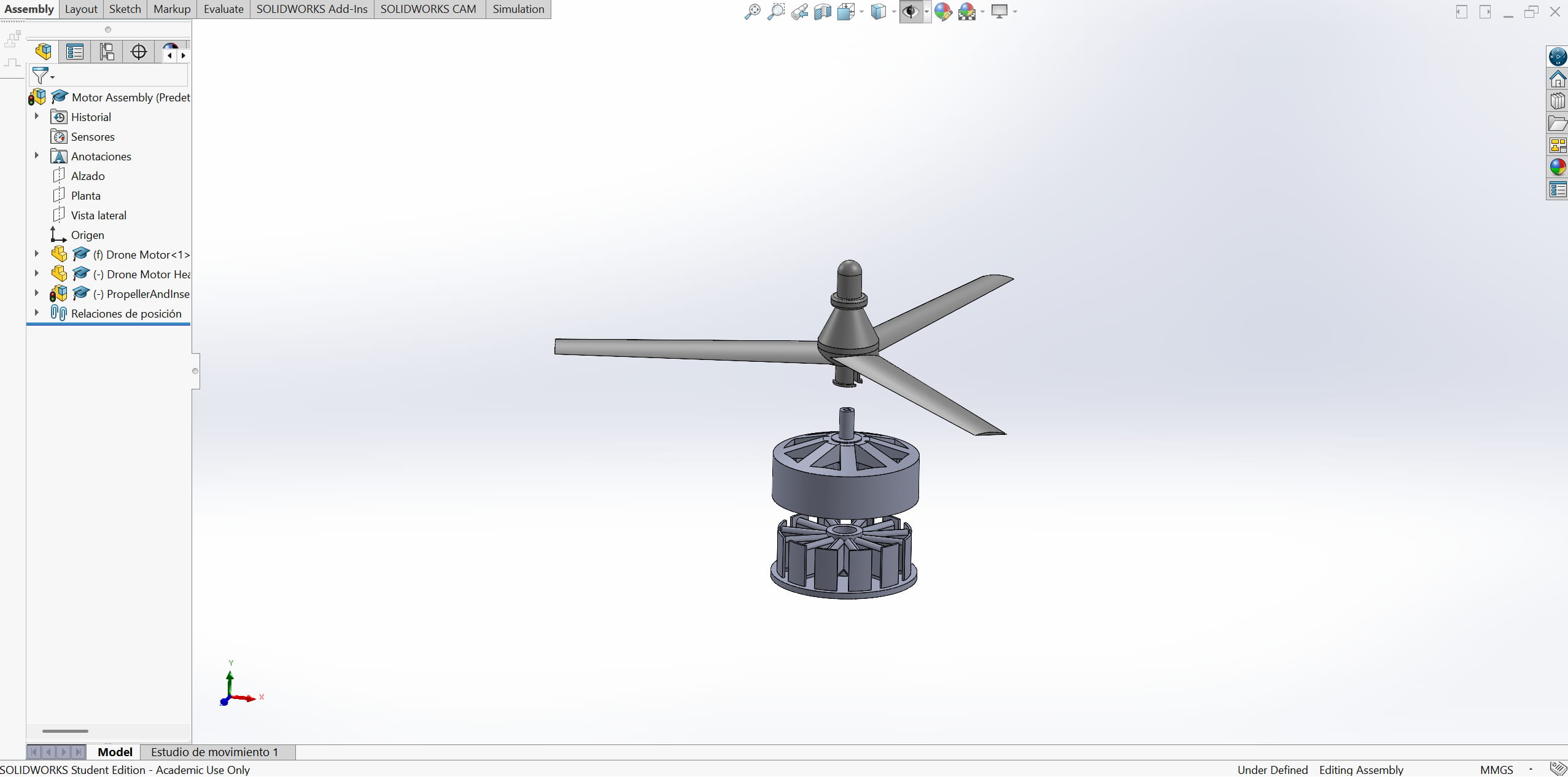
Developed a full concept and system design for a real-world application: an autonomous drug delivery drone. The design objective was to produce a complete, manufacturable assembly within a fixed timeline — from individual components through to a final integrated model.
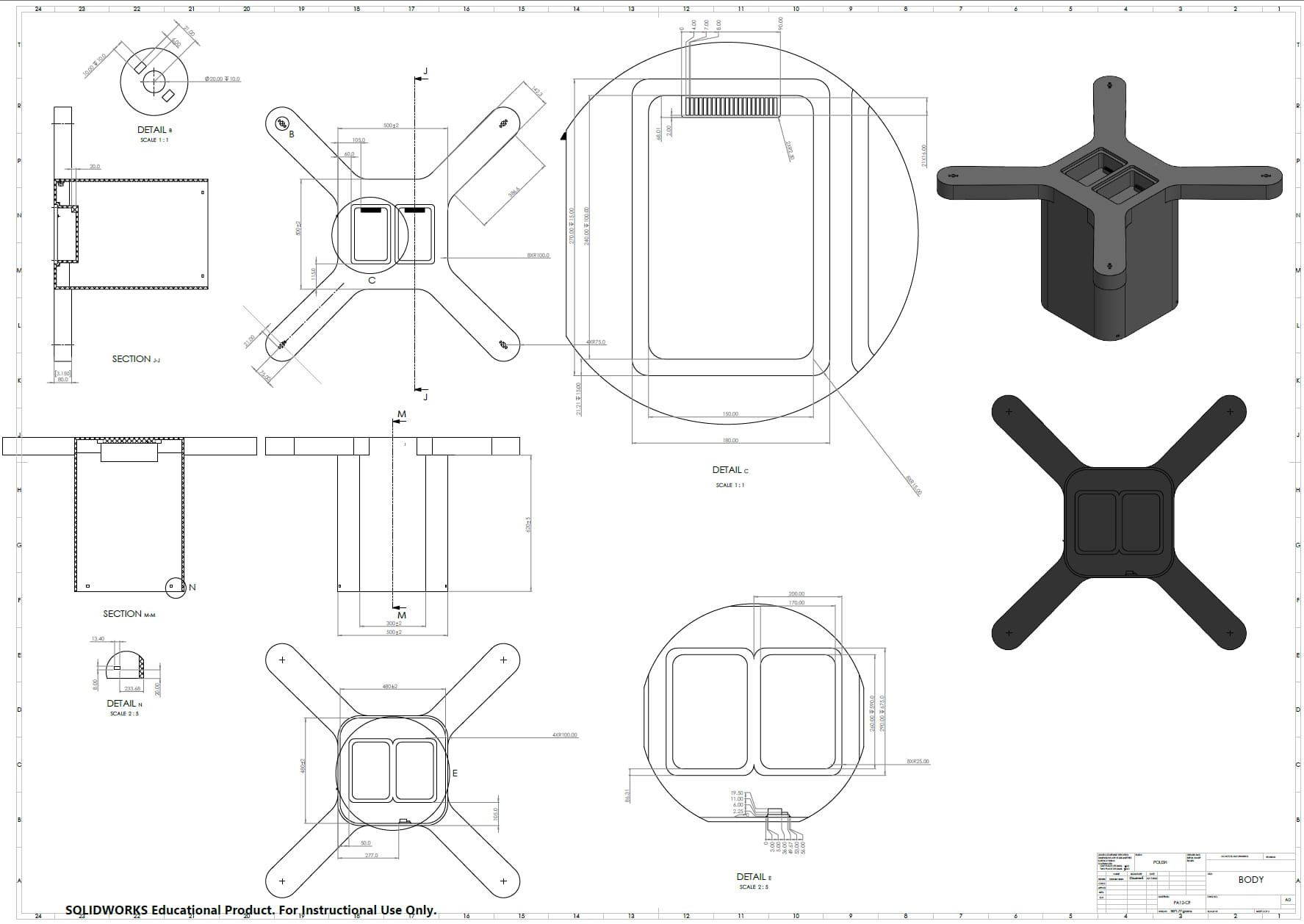
The drone follows a symmetric X-frame layout with four arms extending from a central hub. Each arm terminates in a propeller guard modeled using swept and lofted features in SolidWorks to produce the curved guard geometry. The propellers themselves were modeled as separate sub-assemblies with individual blade geometry defined using surface modeling tools.
The central body houses a dedicated electronics bay with rectangular cutouts for battery and control board mounting, modeled using extruded cuts and shell features to minimize weight while maintaining structural integrity. A payload compartment hangs below the main frame, designed to securely carry a medical package — built using SolidWorks weldments and sheet metal features. Landing gear legs extend from the lower frame, modeled as structural members with filleted joints.
All parts were designed individually and brought together using SolidWorks assembly mates — coincident, concentric, and distance mates — to fully constrain the model. Creo was used for advanced modeling and final presentation visuals.

Designed and built a fully programmable robot for a competitive design challenge, integrating DC motors, pulleys, pneumatic pistons, solenoids, encoders, and sensors into a cohesive electromechanical system. The robot was programmed in C++ using Arduino to identify and manipulate objects autonomously, with AC adapters and a pressure tank powering the actuation system. Iterative testing and redesign of the control logic and mechanical layout reduced task completion time by 28 seconds compared to the initial prototype.
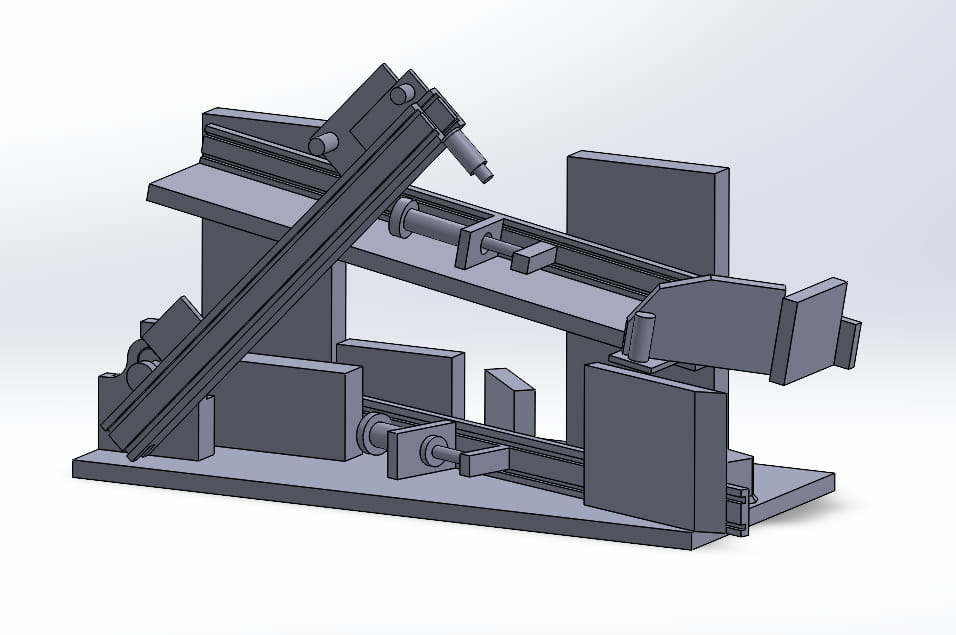
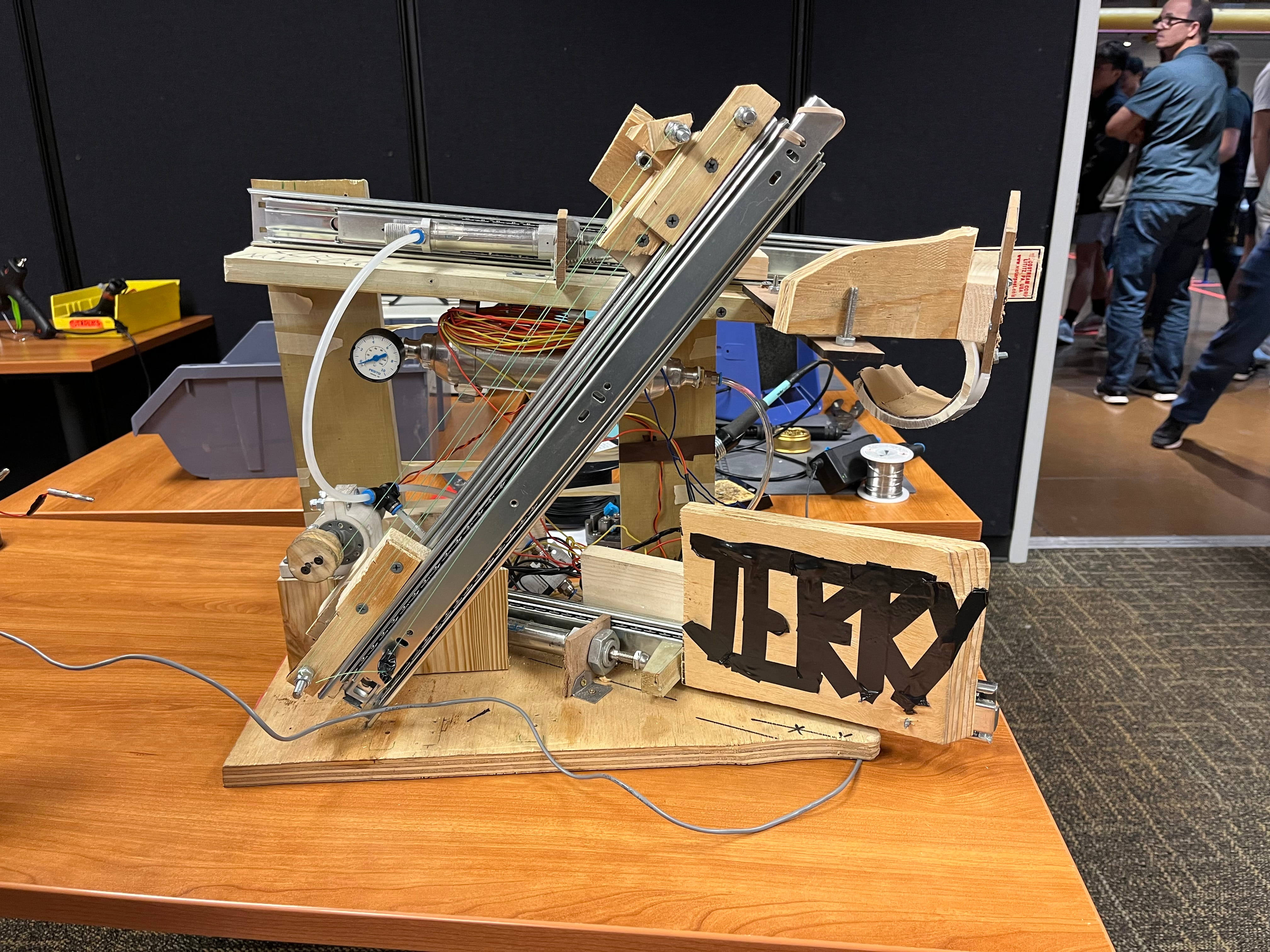
A detailed 3D CAD model of the robot was produced in SolidWorks, with all components drafted to scale to create a precise digital replica used for presentation and documentation. The model captured the full mechanical layout including motor mounts, pneumatic routing, and sensor placement — serving as both a design validation tool and a communication artifact for the team.